DC 모터 시스템 해석 (2) Control Block 기반
류세환 | 2026년 04월 21일 | 46앞선 DC 모터 시스템 해석에서는 State Machine 기반으로 스위치(BJT)를 제어하여 해석을 진행하였다. 이번 해석에서는 Control Block을 활용하여 PI 제어를 구성하고, 해당 제어 신호를 기반으로 스위치를 동작시키는 방식으로 해석을 수행한다.
아래는 스위치의 Control Signal에서 Use Pin을 활성화하여 Control Block과 연결한 회로 구성이다.
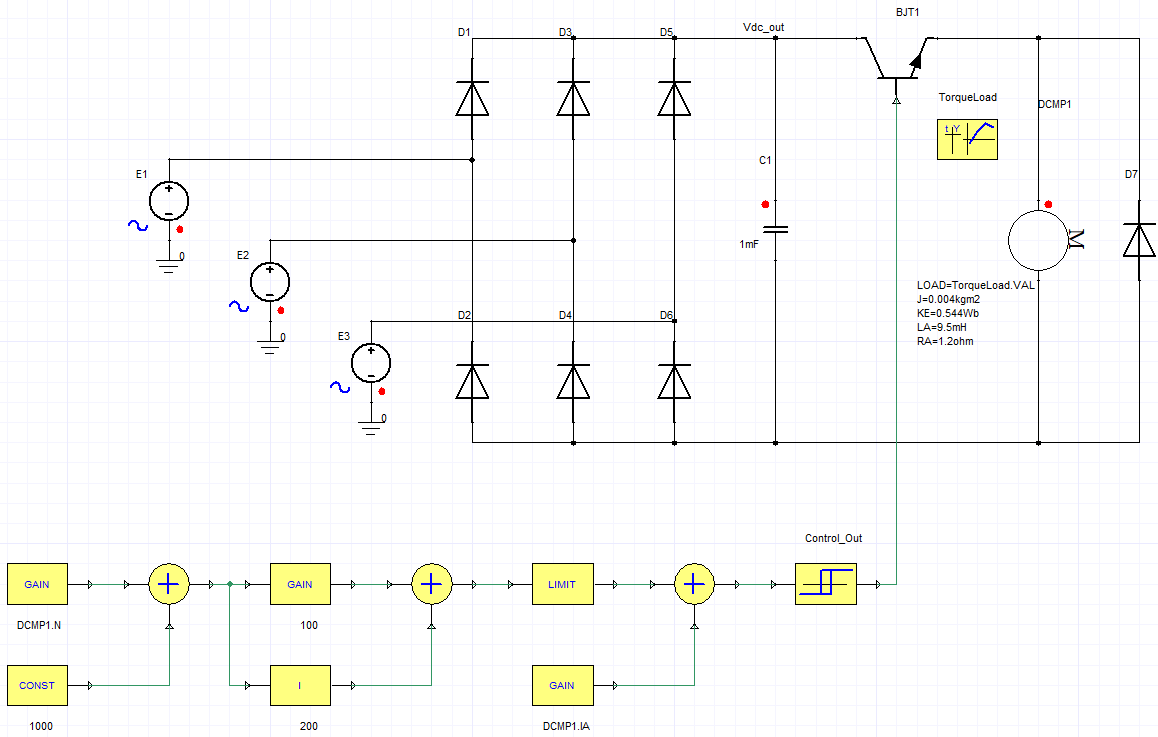
Control Blocks는 Gain, INTG, LIMIT, SUM, CONST 블록으로 구성되며, 전체 구조는 크게 3가지 영역으로 나누어 이해할 수 있다.
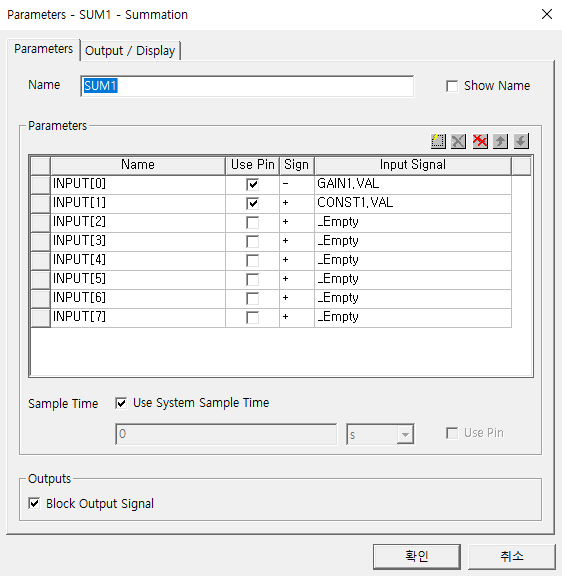
1) 속도 오차 생성
CONST 블록에 입력된 1000은 목표 속도(reference speed)를 의미하며, DCMP의 실제 속도 값인 DCMP.N과의 차이를 계산하여 속도 오차를 생성한다. 즉, 목표 속도 − 실제 속도 = 속도 오차 e(t)이며, 이 값은 이후 PI 제어기의 입력으로 사용된다.
2) PI 제어를 통한 전류 지령 생성
앞선 단계에서 생성된 속도 오차 e(t)를 기반으로 PI 제어를 수행하여 전류 지령값을 생성한다. 이를 통해 모터가 목표 속도에 도달하기 위해 필요한 전류(토크)를 계산하게 된다. 또한, LIMIT 블록을 통해 PI 출력값을 제한한다. 전류 지령값의 상한(Upper Limit)을 설정하여 비현실적으로 큰 전류 요구를 방지하고 시스템 안정성을 확보한다.
비례 제어 (P): 현재 오차에 비례하여 즉각적인 전류 지령 생성
적분 제어 (I): 과거 오차를 누적하여 정상 상태 오차를 제거

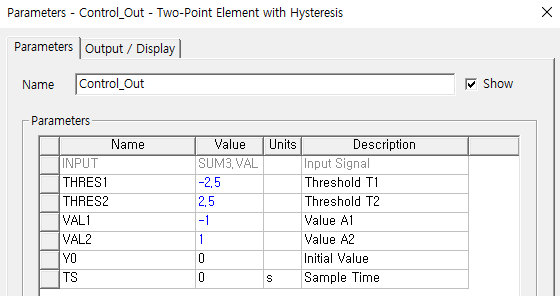
3) 전류 오차 생성 및 스위칭 제어
마지막 단계에서는 DCMP에서 계산된 실제 전류값(DCMP.IA)을 입력으로 받아, PI 제어를 통해 생성된 전류 지령값과의 차이를 계산한다. 이 전류 오차를 기준으로 히스테리시스 기반 스위칭이 동작한다. 이를 통해 실제 전류가 전류 지령값을 추종하도록 제어가 이루어진다.
오차가 Threshold보다 크면 → 스위치 ON (1)
오차가 Threshold보다 작으면 → 스위치 OFF (0)
앞선 해석에서는 전류를 직접 제어하는 State 기반 방식이었다면, 이번 구조는 속도를 기준으로 전류를 생성하고 이를 다시 제어하는 구조이다. 즉, 기존에는 전류를 직접 제어하였다면 현재는 속도 → 전류 → 스위칭 순서로 제어를 한다. 이와 같은 구조는 실제 모터 제어 시스템에서 사용되는 Cascade 제어 구조와 동일하다.
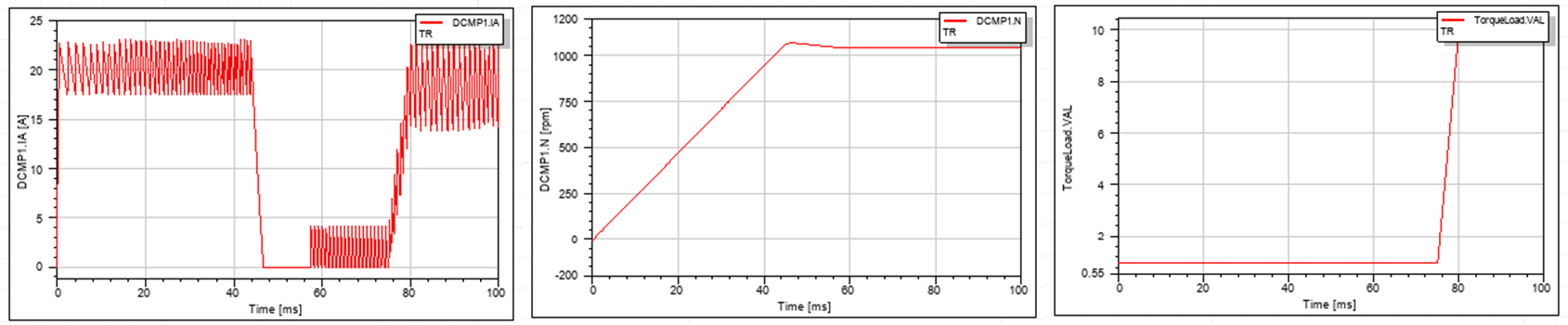
전류(DCMP1.IA), 속도(DCMP1.N), 부하 토크(TorqueLoad.VAL)의 변화를 통해 PI 제어 기반 모터의 응답 특성을 확인하였다.
초기 구간에서는 속도가 목표값에 도달하기 전까지 히스테리시스 제어에 따른 전류 리플이 발생하며, 전류가 일정 수준으로 유지되는 것을 확인할 수 있다. 이 구간에서는 속도 오차가 크게 존재하므로 PI 제어기에 의해 충분한 전류가 지속적으로 공급된다.
이후 약 40ms 시점에서 목표 속도에 도달하면, 속도는 일정하게 유지되며 전류는 급격히 감소하여 낮은 수준으로 유지된다. 이는 속도 오차가 감소함에 따라 PI 제어 출력이 줄어들고, 시스템이 정상 상태에 진입했음을 의미한다.
또한, 약 80ms 이후 부하 토크가 증가하면서 이를 보상하기 위해 전류가 다시 상승하는 것을 확인할 수 있다. 이는 PI 제어기가 부하 변화에 따라 필요한 토크를 생성하기 위해 전류를 동적으로 조절하고 있음을 보여준다.
[결론]
속도 기반 제어를 통해 보다 현실적인 시스템 모델링 가능
적분 제어를 통해 정상 상태 오차 제거
실제 인버터 기반 모터 제어 구조와 유사한 해석 수행 가능
※ 프리미엄 컨텐츠란?
유료회원 및 유지보수 고객에게 제공되는 컨텐츠입니다.
해석 파일 및 다양한 정보를 받아보실 수 있습니다.